Er is een robotarm gemaakt die wordt bestuurd door ademhaling: "het is als een derde arm"

Er is een nieuwe hoogtechnologische oplossing gecreëerd voor degenen die hun motorische functies hebben verloren: we hebben het over robotarmen ontworpen door neuro-engineering. Laten we er meer over te weten komen.
De derde robotarm voor het herstel van motorische functies
EPFL/Youtube screenshot
Het verliezen van sensorische en motorische functies na ongelukken, traumatische gebeurtenissen of neurologische problemen is een aandoening die veel mensen treft. Juist voor hen werkte neuro-ingenieur Silvestro Micera, president van de Bertarelli Foundation in Translational Neuroscience and Neuroengineering bij EPFL, Zwitserland, en hoogleraar Bio-elektronica aan de Hogeschool Sant'Anna, die zijn werk voor het eerst richtte op de verbetering van cognitieve functies en het menselijk lichaam, en slaagde erin technologische en geavanceerde oplossingen te ontwerpen. In de studie die samen met zijn team werd gepubliceerd, beschreef hij de methode om de bewegingen van het middenrif te volgen om een derde robotarm aan het menselijk lichaam te kunnen gebruiken.
Micera legde uit: “Deze studie opent nieuwe en opwindende mogelijkheden door aan te tonen dat extra armen uitgebreid kunnen worden gecontroleerd en dat gelijktijdige controle met beide natuurlijke armen mogelijk is.” Het onderzoek is ondergebracht in het project Third-Arma, dat tot doel heeft een robotarm beschikbaar te stellen die hulp kan bieden bij het uitvoeren van dagelijkse activiteiten, maar ook bij reddings- en zoekacties. "De belangrijkste motivatie voor deze derde arm-controle is het begrijpen van het zenuwstelsel. Als je de hersenen uitdaagt om iets compleet nieuws te doen, kun je erachter komen of ze daartoe in staat zijn en of het mogelijk is om dit leren te vergemakkelijken. Deze kennis kunnen we vervolgens overdragen om bijvoorbeeld hulpmiddelen voor mensen met een beperking of revalidatieprotocollen na een beroerte te ontwikkelen.”
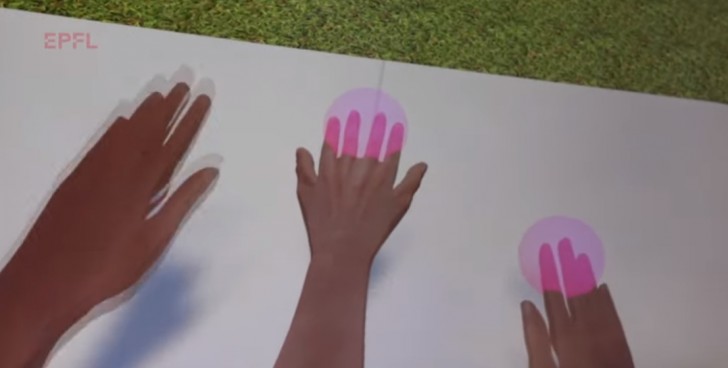
De test van de derde arm in de virtuele omgeving
EPFL/Youtube screenshot
Co-auteur van het onderzoek Solaiman Shokur, senior wetenschapper EPFL bij het Neuro-X Institute, voegde hieraan toe: “We willen begrijpen of onze hersenen geprogrammeerd zijn om te controleren wat de natuur ons heeft gegeven en hebben aangetoond dat ze zich kunnen aanpassen om nieuwe ledematen te coördineren in combinatie met biologische.” In wezen, legt hij uit, gaat het om het verwerven van nieuwe motorische functies die verband houden met versterking, naast de functies die al bestaan bij een individu, of het nu gezond of gehandicapt is. “Vanuit het perspectief van het zenuwstelsel is het een continuüm tussen revalidatie en verbetering.”
De onderzoekers onderzochten de potentiële cognitieve beperkingen van de robotarm door een virtuele omgeving te creëren, waarin een gezond individu probeerde een virtuele arm te manoeuvreren door het middenrif te besturen. Uit de test bleek dat het gebruik van het middenrif het gebruik van spraak, blik of fysieke armen niet verstoort of belemmert. In de virtuele configuratie is de gezonde proefpersoon uitgerust met een riem die diafragmatische beweging detecteert. Via een specifieke virtual reality-headset kan het het rechter bovenste ledemaat, het linker bovenste ledemaat en een derde centrale arm bekijken met een symmetrische hand bestaande uit zes vingers. Deze keuze werd ingegeven door de wens om een voorkeursoriëntatie op de linker- of rechterhand te vermijden.
Op dit punt werd de deelnemer gevraagd om de virtuele handen uit te strekken met behulp van de correspenderende handen, inclusief de symmetrische hand. Met behulp van een exoskelet dat wordt ondersteund door beide fysieke armen, kan de gebruiker de virtuele linker- en rechterarm manoeuvreren, terwijl de riem rond het middenrif de beweging van de centrale symmetrische arm detecteert. Deze testconfiguraties werden uitgevoerd met 61 verschillende proefpersonen in meer dan 150 verschillende sessies.
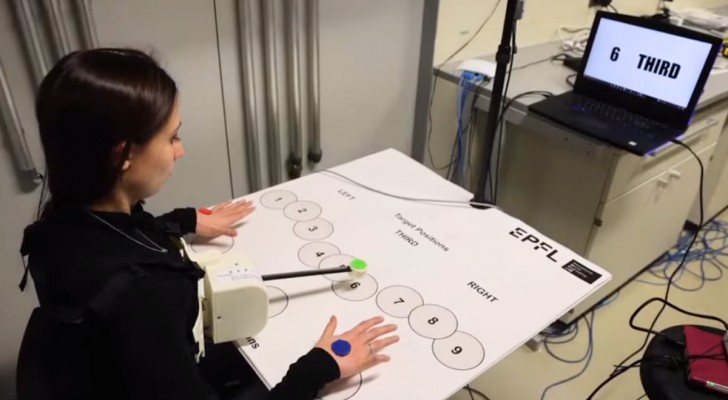
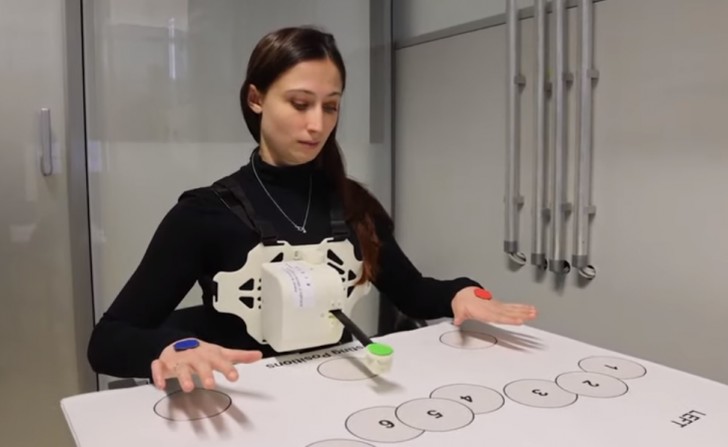
De ademhalingsgestuurde robotarm is eenvoudig en intuïtief
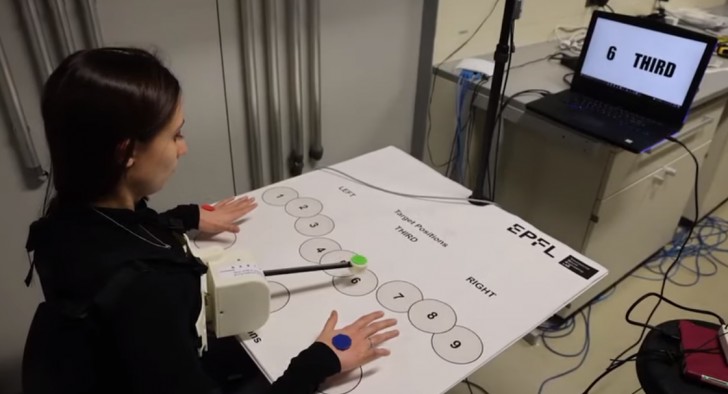
EPFL/Youtube screenshot
Het besturen van het middenrif om de derde arm te bewegen was zeer intuïtief. De deelnemers leerden het heel snel onder controle te houden. Vervolgens testten de onderzoekers de aansturing van het middenrif ook met een echte robotarm, bestaande uit een eenvoudige staaf die uitschuift wanneer de persoon het middenrif samentrekt. Een ander experiment, in lijn met het virtuele experiment, betrof het bewegen van de muis door deze met de rechterhand, linkerhand en robotarm over cirkels te plaatsen.
Hoewel het onderzoek het verdere experiment niet vermeldt, werd ook de mogelijkheid onderzocht om de rudimentaire spieren van het oor te gebruiken bij het uitvoeren van eenvoudige handelingen. Er worden oorsensoren aan de persoon bevestigd en door zichzelf te trainen in het gebruik van de subtiele bewegingen van deze spieren, kan hij proberen de muis in de gewenste richting te sturen. Shokur verduidelijkte dat "gebruikers deze oorspieren mogelijk zouden kunnen gebruiken om een extra ledemaat te controleren." Micera legde uit wat de toekomstige focus zal zijn: "Onze volgende stap is het onderzoeken van het gebruik van complexere robotapparaten met behulp van onze verschillende besturingsstrategieën, om real-life taken uit te voeren, zowel binnen als buiten het laboratorium. Alleen dan zullen we in staat zijn om het ware potentieel van deze aanpak te begrijpen.”
Het enige dat overblijft is wachten op de verdere ontwikkelingen van sensomotorische controlestrategieën en steeds beslissendere en innovatievere mens-machine-interfaces.